¶ Guideline on how to start the Lokomat & connect to it (Position Control)
¶ Turning on the system
- Plug in the white power strip to enable power supply for both the internal target computer (treadmill) and the external target computer (orthosis).
- Turn on the external target computer by pressing the power button. Check that the computer boots up, and the external monitor on top of the computer switches on.
- Plug in the black plug of the large emergency stop labeled “Driver PSU’s + Treadmill”. This is only needed if you want to run the Lokomat, if you only want to connect to the target external computer you do not need to plug it in.
- Turn on the host computer and login in with the password.
¶ Defining the trajectory and configuring the settings
- Save your desired trajectory in the
MATLAB/Lokomat-Simulink/LokomatControl/setup/datadirectory.
Note: Ensure that the trajectory format matches that oftrajectories_dario.mat. - Open and execute the
MATLAB/Lokomat-Simulink/LokomatControl/setup/init_PosControl.mfile to set the settings for the position control model. - Modify the trajectory name within the init file if you want to load a different trajectory.
¶ Building the model and connecting to the target computer
-
Load the position control model:
MATLAB/Lokomat-Simulink/LokomatControl/models/PositionControl/LokoFree_PositionControl_500Hz.slx. -
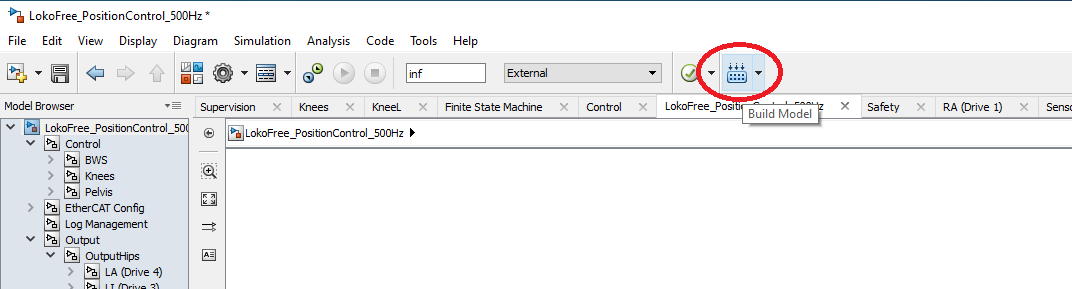
Build the model in simulink (see image below).
Note: Make sure you are inside the build folder (MATLAB/Lokomat-Simulink/LokomatControl/build) before you start to build the model.
-
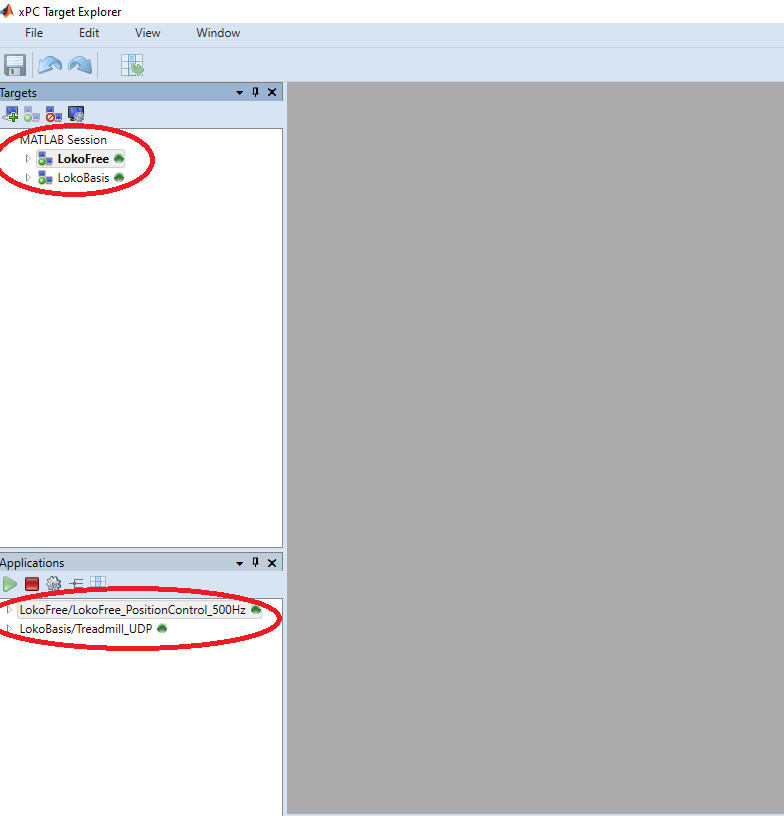
Once the model is successfully built, type
xpcexplrin the MATLAB command window. This will open th xPC Targt xplorer (see image below).
-
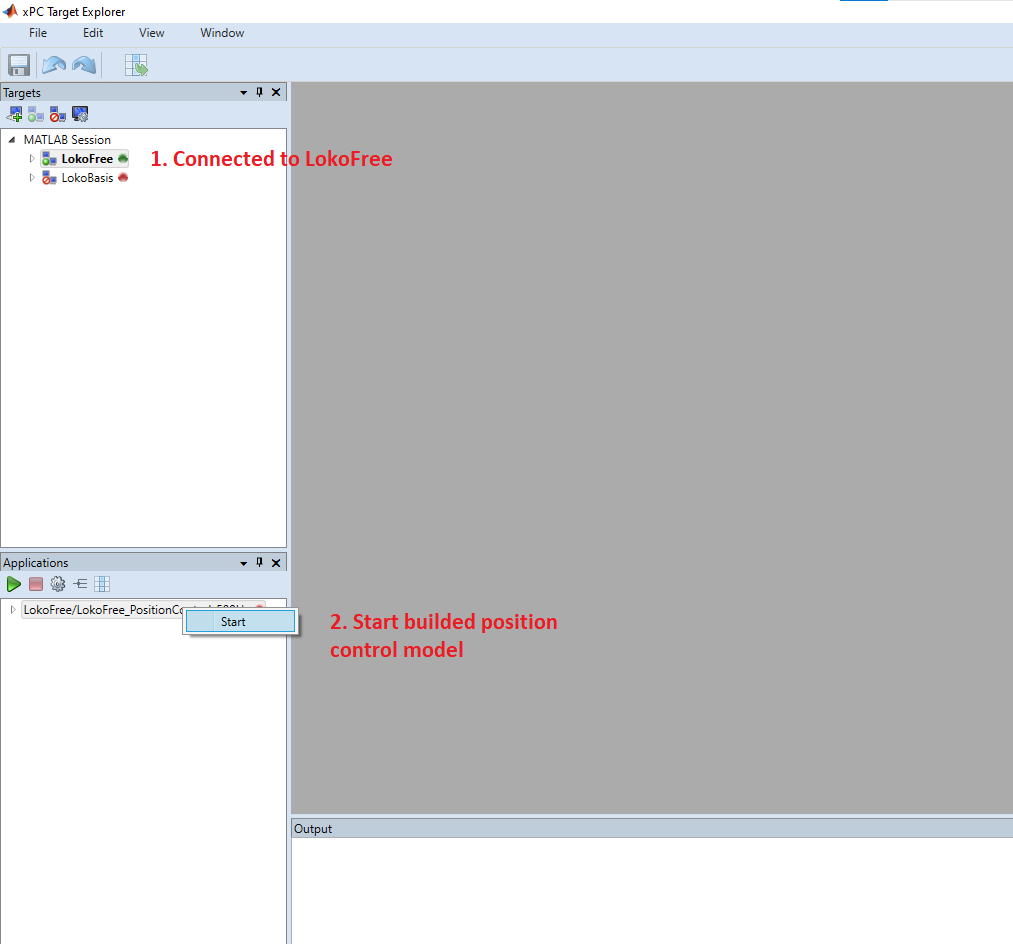
Once the model has been successfully built, you should see that a connection to LokoFree has been established. (1)
-
The built model should also be displayed under Applications, where you have to start the model by right-clicking on the model’s name. (2)
-
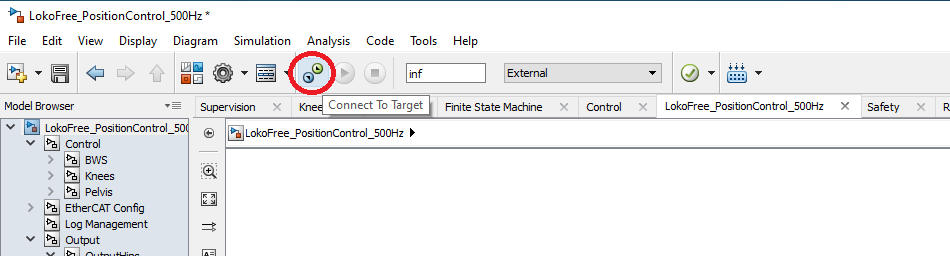
Now connect the Simulink model to the target computer to start the connection with the Lokomat (see image below).
¶ Creating UDP connection to the treadmill
-
Open
MATLAB/Lokomat-Simulink/TreadmillControl/scripts/startTreadmill.mand execute the first two paragraphs to initiate the UDP treadmill connection (see image below). To execute a single paragraph, select the paragraph and press ‘Ctrl+Enter’.
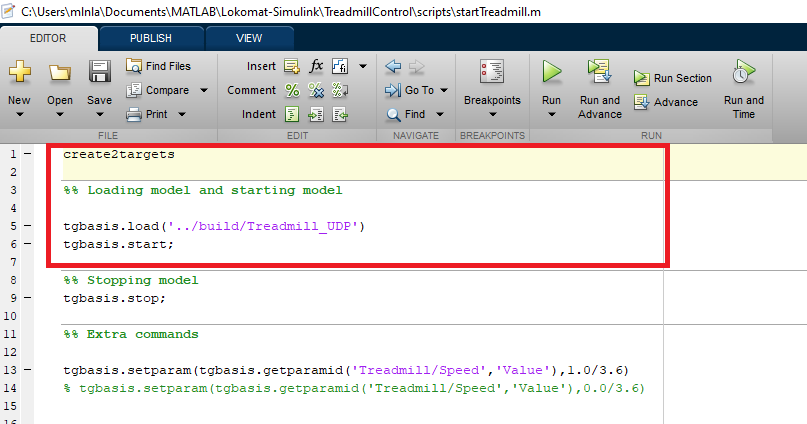
Note: Ensure that your current folder is correct. Meaning that you are in the folder where the file is located to execute the command successfully. If the connection fails, an error will be displayed in the MATLAB Command Window. -
To verify that you are also connected succesfully to the treadmill via the UDP connection, check in the xPc Target explorer if you are also connected to LokoBasis and if the Treadmill_UDP is started (see image below).