¶ LinMot MC SW
LinMot Motion Control Software
This guide is still very much a work in progress so it should be treated as such, feel free to add/correct info.
¶ Terminology
- Rising and falling edge source source2
- Rising edge: signal transition from logic low to logic high.
- Falling edge: signal transition from logic high to logic low.
¶ Parameters
Parameters consist of a set of 16 single bit values. These together make a binary number, which can be translated to a decimal number (e.g. using this website)
Note: bit counting starts at 0, so bit 0 is the first bit, and bit 7 is the 8th bit etc.
¶ WarnWord errors
¶ Inputs
¶ StateVar (pg 13)

¶ StatusWord (pg 19)
¶ WarnWord (pg 20)
128= Motor Not Homed (only bit 7 is flipped)- Bin:
0000000010000000
- Bin:
¶ Outputs
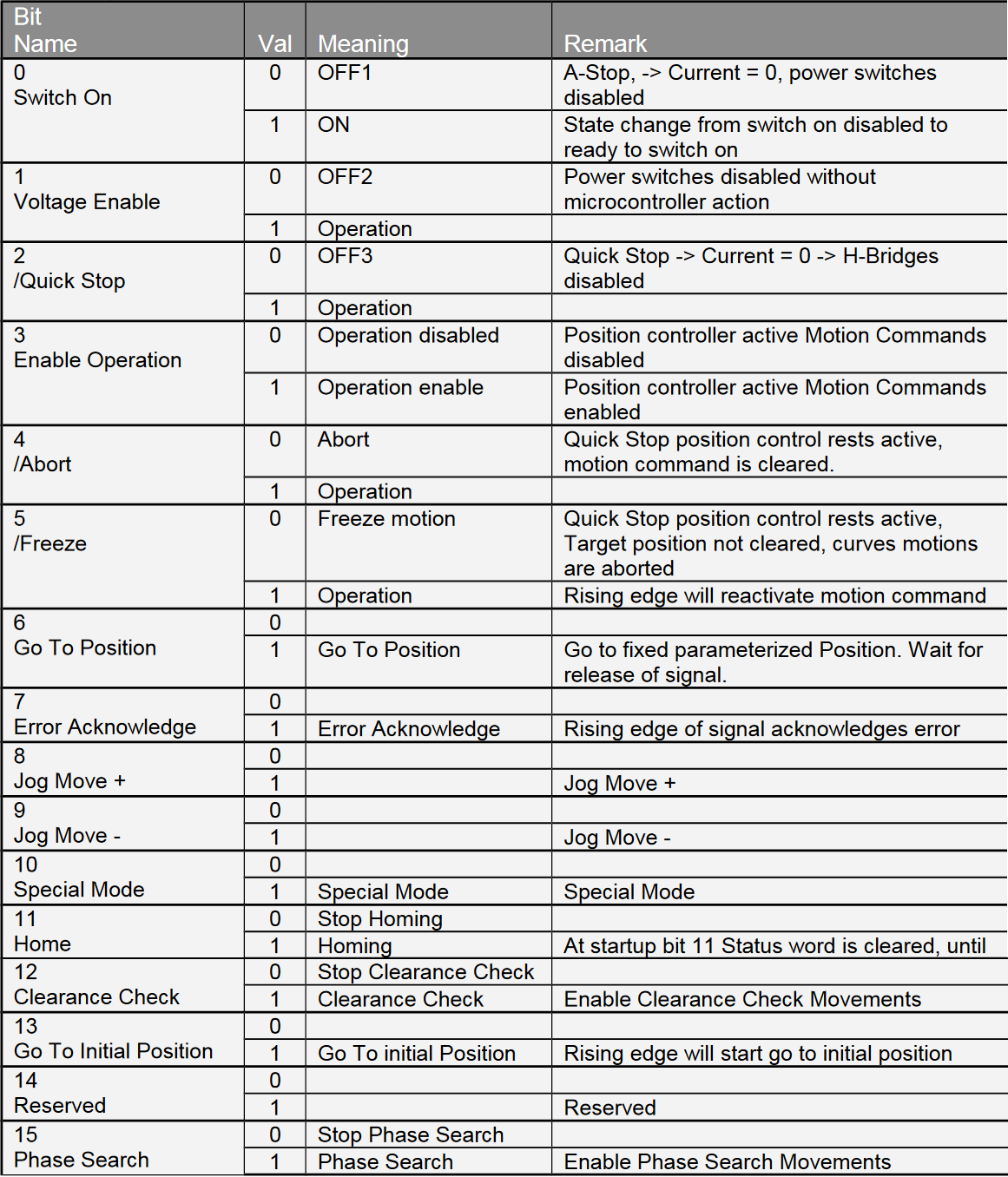
¶ ControlWord (pg 17)
With the Control Word (16Bit) the main state machine of the drive can be accessed.
- Standard
1111111- All regular things on, and go to position on10111111
00000000
¶ Frequently used Controlword commands
The following are frequently used ControlWord commands, that can be used with LinMot Drivers E1250 and C1250.
A good start-up sequence (in dec) is:
182 - 55 - 2239 - 63
¶ Off
bin: 0000 0000
hex: 0
dec: 0
¶ On
bin: 0000 0001
hex: 1
dec: 1
¶ /Quick stop
bin: 0000 0100
hex: 4
dec: 4
¶ /Quick stop w/ Error clear
bin: 1000 0100
hex: B6
dec: 182
¶ Switch on + Quick stop w/o Error clear
bin: 0000 0101 / 0011 0111
hex: 37
dec: 55
¶ Operation enabled w/o Error clear
bin: 0000 1101 / 0011 1111
hex: 3F
dec: 63
¶ Operation enabled w/ Error clear
bin: 1000 1101 / 1011 1111
hex: BF
dec: 191
¶ Operation enabled w/ Error clear + Homing
bin: 1000 1011 1111
hex: 8BF
dec: 2239
¶ Go to position w/o Error clear
bin: 0111 1111
hex: 7F
dec: 127
¶ CommandHeader (pg 21)

- 144=homing?
- 00000000 1001 0000
- Setting it to
256sets the Master ID’s first bit (9th bit in total) to 1. Assigning a Master ID to the commands we are inputting
From the manual: “A new command will only be executed, if the value of the command count has changed. In the easiest way bit 0 can be toggled.”
In other words, we can flip between 256 and 257 to allow commands to be executed each update.
¶ Controlling BM8050
- Set ControlWord from 0 to 1
- This initiates some hardware checks
- You should not be able to move the motor now
- If you check WarnWord, it will show motor not homed (
128), though this should already be shown before even changing to 1
- Set ControlWord from 1 to 2239
- This initiates the homing procedure
- Motor goes all the way to the end, then goes back slightly.
- Once completed, WarnWord will change to
0(if no other errors occured)
- This initiates the homing procedure
- …
¶ LinMot Error Decoder Python Script
This was some mockup code and can be improved a lot, but may be used as a basis for the next person working on this.
controlWord = [
"Switch On",
"Voltage Enable",
"Quick Stop",
"Enable Operation",
"Abort",
"Freeze",
"Go To Position",
"Error Acknowledge",
"Jog Move +",
"Jog Move -",
"Special Mode",
"Home",
"Clearance Check",
"Go To Initial Position",
"Reserved",
"Phase Search"
]
warnWord = [
"Motor Hot Sensor",
"Motor Short Time Overload I^2t",
"Motor Supply Voltage Low",
"Motor Supply Voltage High",
"Position Lag Always",
"Reserved",
"Drive Hot",
"Motor Not Homed",
"PTC Sensor 1 Hot",
"Reserved PTC 2",
"RR Hot Calculated",
"Reserved",
"Reserved",
"Reserved",
"Interface Warn Flag",
"Application Warn Flag"
]
statusWord = [
"Operation Enabled",
"Switch On Active",
"Enable Operation",
"Error",
"Voltage Enable",
"Quick Stop",
"Switch On Locked",
"Warning",
"Event Handler Active",
"Special Motion Active",
"In Target Position",
"Homed",
"Fatal Error",
"Motion Active",
"Range Indicator 1",
"Range Indicator 2"
]
wordsDict = {
"control": controlWord,
"warn": warnWord,
"status": statusWord
}
def printMeaning(decimalValue,wordType,onlyShowTrue=False):
print("Decoding {} for {}".format(decimalValue,wordType))
binVal=bin(decimalValue).split("b")[-1]
nZeros=16-len(binVal)
fullBinVal=nZeros*"0" + binVal
bits = fullBinVal[::-1] # reverse (so that bits[0] is the first bit)
print("Full 16-bit Binary Value: " + bits)
wordList = wordsDict[wordType]
for bitNum,bitVal in enumerate(bits):
if (onlyShowTrue and bool(int(bitVal))) or (not onlyShowTrue):
print("{}:{} = \t {}".format(bitNum,wordList[bitNum], bitVal).expandtabs(40))
#controlWord,warnWord,statusWord
printMeaning(128,"warn")
printMeaning(16567,"status",True)
#printMeaning(256,"status")