See also:
¶ Log
Our Lokomat is heavily customized, doesn’t always work, and continues to be updated. To keep track of all changes and backtrack potential errors, an update log is kept on this page. If any changes to the system are made, or new problems are uncovered, they will be presented here.
¶ 2022-06
¶ 2022-06-10
Alex, Maurits
-
Worked on:
- Knee motors and the Humusoft AD622 board that hooks up to the Maxon drivers that control them.
-
Changes made:
- The EPB870616 board that hang loose in the xPC touched the metal plate of the xPC and got fried. The board was responsible for ensuring the PC fans were working correctly. They still work, but this safety feature is now gone. We will have to find a new or different board to replace it (this board gets listed as Vintage Retro nowadays). For now it’s not much of a problem because the PC case is opened up completely and these fans aren’t critical.
- AD622 board got connected and powered just for testing purposes, wiring for this needs to be redone when finally connecting them to the Maxon motor drivers once everything is confirmed to be working.
-
Knowledge Gained:
- The Humusoft MF624 board that got mentioned in some of the Simulink models related to the knee motors is not present in either of the xPC’s. Instead, we found a Humusoft AD622 board, which was not powered or linked up in any way. We connected the board and made a simple barebones simulink model with the AD622 blocks that were already part of the Simulink xPC library on the host PC.
- The AD622 board was tested and confirmed to be working. Output was tested by sending signals through a barebones simulink model and using a multimeter to measure the signals. Input was tested by sending a signal to the input pins and outputting this value on a scope.
¶ 2022-06-15
Alex, Maurits
-
Worked on:
- Knee motors.
-
Changes made:
- Linked a simple motor to one of the Maxon drivers. We’ve also opened up one of the knee motors and looked at what sensors & wires are inside. This was documented for the right knee motor on the Lokomat knee wiki page.
- Changed around folder structure of Simulink files and cleaned up everything so it is a lot easier to manage and find files.
-
Knowledge Gained:
- The AD622 board was actually already in the full LokoFree model. It was just within the BWS blocks for some reason. We’re not yet fully sure how to get the motors to move, but we’ve found a new place to continue looking.
¶ 2022-06-16
Alex, Maurits
-
Worked on:
- Knee motors
- Treadmill
-
Changes made:
- Added some text to the scopes of the Treadmill model
- We checked all the parameters of the motor driver. After changing some settings back to their original, we are now able to toggle the brake with the e-stop.
- Made the folder structure a lot clearer & more manageable, & uploaded new version to gitlab.
-
Knowledge Gained:
- The
TreadmillErrorwordchanges to8after some time. For more info, see Treadmill Error Word - The
BreakActiveparameter stays on1, even though we can see the brake disengage. It’s clear now that the communication from the brake to the VFD seems to be defective. We can bypass this check by hardwiring it, or with a software bypass by modifying the simulink model somewhat.
- The
¶ 2022-06-16
Maurits
-
Worked on:
- Treadmill
-
Changes Made:
-
Now able to start and stop the treadmill motor as well as change its speed!
- Disabled I/O ports at vfd (that run to the pcb), to bypass the Brake Check.
- The motor was factory reset, which allowed a re-tune, after which the parameters supplied by Hocoma were re-applied.
-
-
Knowledge Gained:
- For sure, the problem arised from the communication from the brake to the vfd.
¶ 2022-06-22
Stefano, Maurits
-
Worked on:
- BWS (encoder and potentiometer)
-
Changes Made:
-
Now able to read BWS encoder and potentiometer (not yet calibrated) and run the BWS motor from Simulink model
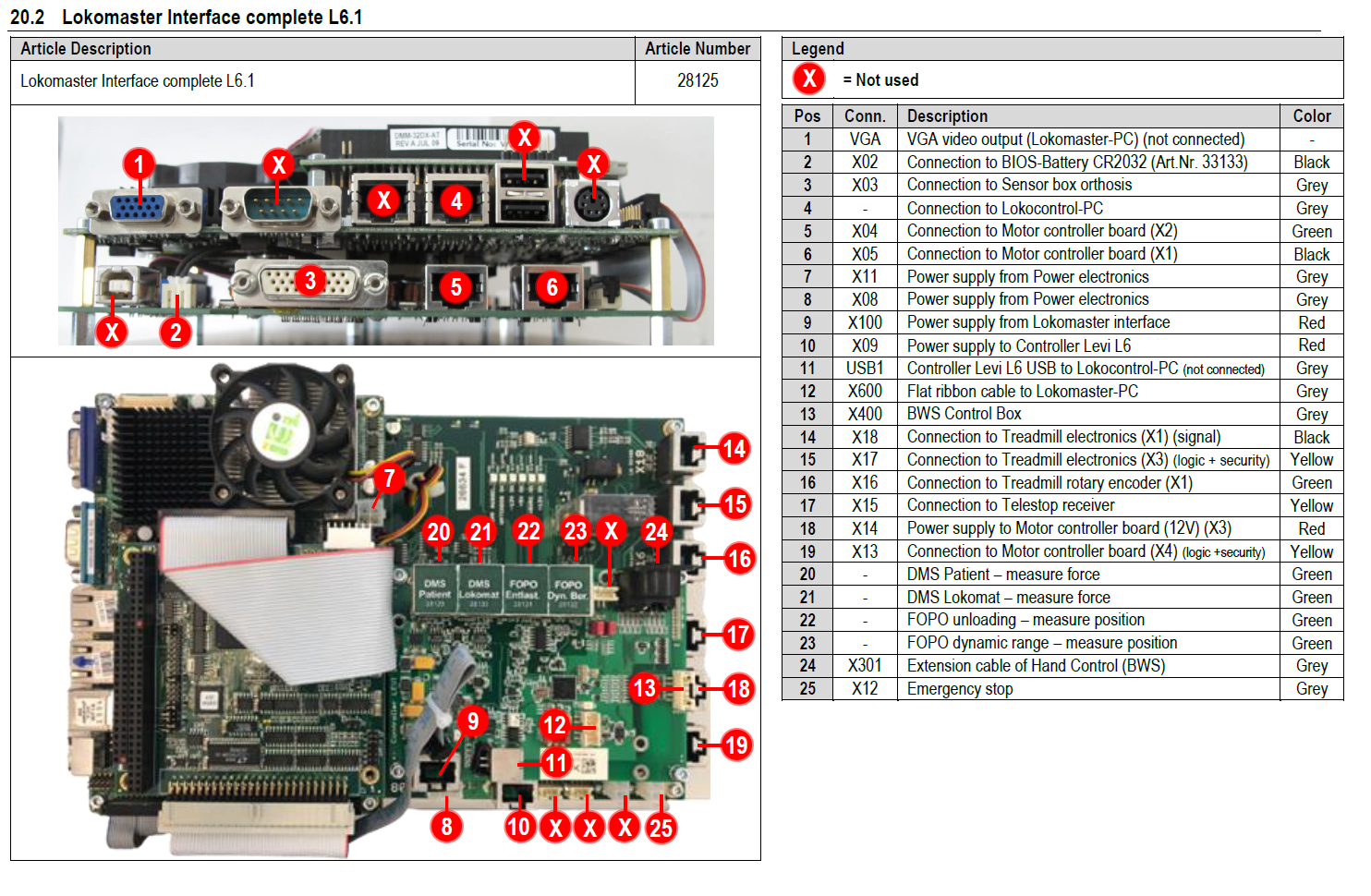
- Rewired the BWS Maxon encoder into the Beckhoff EL5101 module (Channel I/C not connected).
- Checked Potentiometer reading through Simulink
- Used the SensorsReadOut.slx model to test BWS functionalities.
-
BWS encoder color coding (encoder cable):
1. Not connected
2. Vcc = green
3. GND = black
4. Not connected
5. A* = orange
6. A = red
7. B* = white
8. B = blue
9. I* = yellow (not connected to Beckhoff EL5101)
10. I = brown (not connected to Beckhoff EL5101)
- Knowledge Gained:
- The potentiometer reading is correctly detected by the Simulink model through Beckhoff clamps
- The encoder reading from the Simulink model doesn’t work properly. The zero value is not correct.
- The EncVel signal is computed by differentiating the Potentiometer value.
- The Kalman filter position output looks like a velocity.
- The calibration procedure (to give an absolute reference to the relative encoder is not working properly).
¶ 2022-06-23
Stefano, Maurits
-
Worked on:
- Treadmill
-
Changes Made:
-
Treadmill is fully functional from Simulink Model. It is now possible to start, stop and change speed.
-
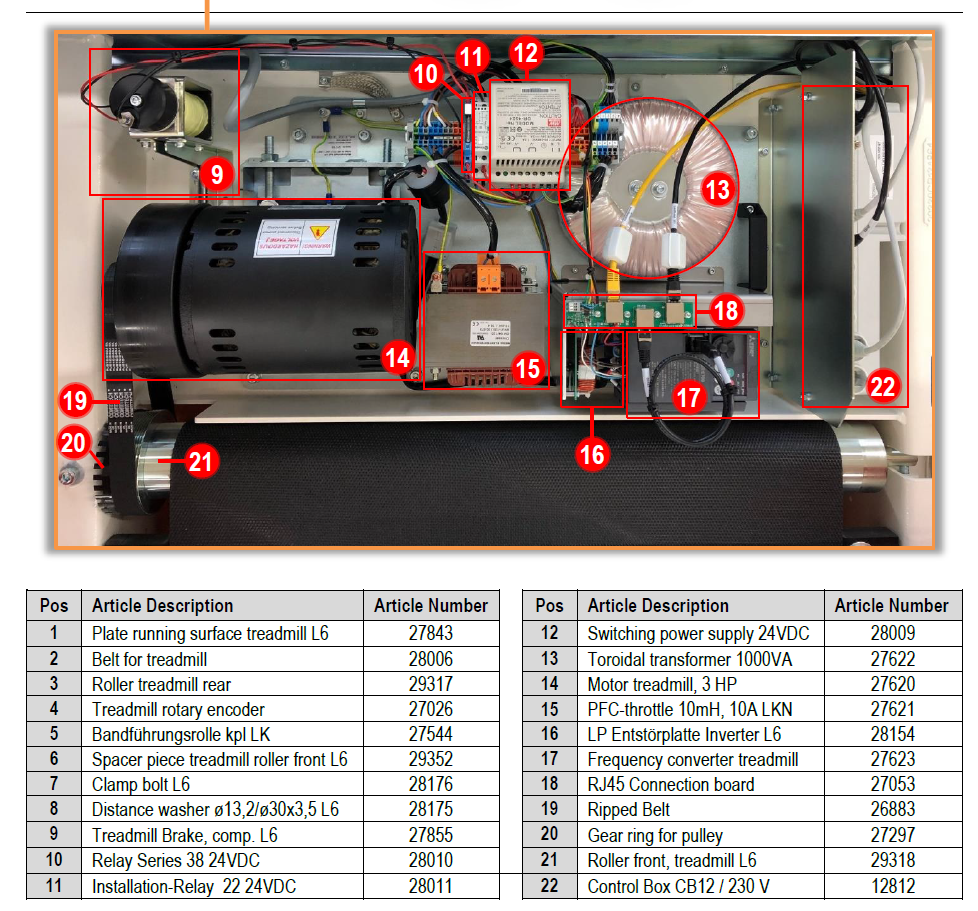
Performed some additional checks on the treadmill following Hocoma technical support instructions (see scheme below). The inductive sensor (on top of 9) is working properly, but no brake-active feedback is sent back from the inductive sensor to the xPC target. In the Mitsubishi inverter (17) Changed Pr.17=0 to bypass the MRS brake-active check. However, if the configuration Pr.17=4 is used, the treadmill does not work: the brake (9) is disengaged but the motor does not start.
-
Checked all connections and cable management.
-
-
Knowledge Gained:
- The treadmill is fully functional when operated with configuration Pr.17=0 in the Mitsubishi inverter (provisional change). Now waiting for Hocoma to deliver the spare part of the RJ45 Connection Board.
¶ 2022-06-24
Stefano, Alex
-
Worked on:
- BWS (motor and sensors)
-
Changes Made:
-
BWS works, but needs some tuning of sensors, filters and control gains.
-
Rewired the Maxon Motor on top of the Lokomat (BWS motor) to the Maxon ADS_E driver.
BWS motor color coding:
Motor+ = Red = White (round connector) = Light Blue (ADS_E)
Motor- = Black = Brown (round connector) = Pink (ADS_E)- Rewired the ADS_E to the Humusoft board on Channel 3
Humusoft BWS (Channel 3):
DA2 = analog-value
DO2 = digital-enable-
Created a start_BWS.m script to launch tests with the BWS support.
-
Checked motor signs and encoder signs.
-
Performed some tests with the TestBWS.slx model to make the BWS move according to the desired trajectory.
-
-
Knowledge Gained:
- The BWS sinusoidal wave is not correct: too slow, offset is wrong, amplitude is wrong.
- Need to tune
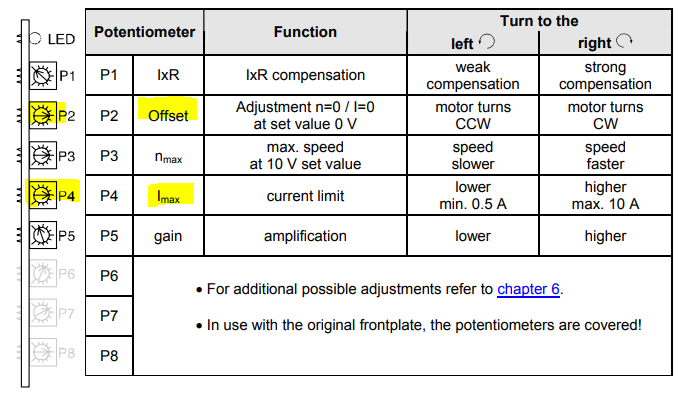
P2 OffsetandP4 Imaxaccording to desired output motor current. Set to pre-adjustment values for the BWS (P2 = 0, P4 = 50% = 5A) - PD control gains are not suitable for the selected control frequency 500 Hz. Needed to increase gains to 1000/100 to exhibit smooth movements.
TODO
Change frequency back to 1kHz (now is 500Hz).
Check potentiometer+encoder calibration.
Check Kalman and LP filters.
¶ 2022-06-27
Stefano
-
Worked on:
- BWS (potentiometer calibration)
-
Changes Made:
- Created a
TestBWS_SDG.slxmodel to test BWS sensors. - Trying also to save logs from the host computer.
- Created a
-
Knowledge Gained:
- The BWS potentiometer reading is not linear and cannot be used (reason why the system was reading almost random values). I could have been damaged by excessive vertical forces on the BWS: when high loads are applied, the linear rail deforms and the needle slips and scratches the potentiometer.
Planning to get a potentiometer spare here
¶ 2022-06-27
Stefano
-
Worked on:
- Homing of Pelvis and other
-
Changes Made:
- Created a
TestBWS_SDG.slxmodel to test BWS sensors. - Trying also to save logs from the host computer.
- Created a
-
Knowledge Gained:
- The BWS potentiometer reading is not linear and cannot be used (reason why the system was reading almost random values). I could have been damaged by excessive vertical forces on the BWS: when high loads are applied, the linear rail deforms and the needle slips and scratches the potentiometer.
Planning to get a potentiometer spare here.
¶ 2022-06-28
Stefano
-
Worked on:
- Update EtherCAT cycle time to 1ms (1kHz).
-
Changes Made:
- Reconfigured the ENI through TwinCAT to work at 1kHz.
- Failed to run the Simulink model at 1kHz (cycle time = 1ms).
- The Real-Time CPU overloads badly (0.016 TET vs 0.001 cycle time). It is not a matter of computational operations, but of EtherCAT driver compatibility.
-
Knowledge Gained:
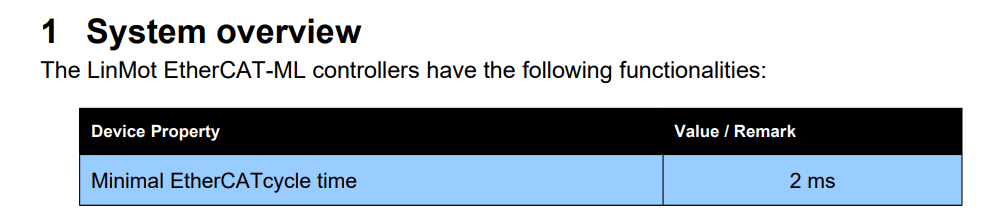
- The B8050-ML-EC Multi-axis EtherCAT interface cannot run at cycle time below 2ms. This is why the Simulink model was changed from 1kHz to 500Hz. See here for further details.
- Try to get back to a working version at 500Hz. Some tuning might be needed.
The LinMot Multi-axis EtherCAT interface minimum cycle time is 2ms (500Hz)
¶ 2022-07-01
Stefano
-
Worked on:
- Working demo of the Lokomat
-
Changes Made:
- Check physical connections with motor drivers of the Knees.
- Hard-fixed the faulty potentiometer on the BWS module.
- Hard-fixed the LA homing position (-30235 potentiometer offset).
- Created a
startDemo_SDG.mscript to load/run/pause the Lokomat + Treadmill. - Created a
LokoFreeNew_SDG.mdebug Simulink model for testing.
-
Knowledge Gained:
The Lokomat Demo is now working with all installed modules.
- TODO:
Need to switch Knee R and L in the Humusoft board (they are inverted and I needed to switch wires in the HWOut Simulink Model)
Need to switch KneeR Motor+ and Motor- (they are inverted and I needed to add a -1 gain to the KneeR before the Humusoft Simulink Block)
Some tuning required in:
- BWS
- Pelvis
- KneeR and KneeL (also retune Maxon ADS_E trimmers)
¶ 2022-08
¶ 2022-08-05
Alex
-
Worked on:
- Updating the version of Simulink Realtime to 2017b
-
Changes Made:
- BIOS boot order was changed (to get into the BIOS, press
DELkey on startup).
- BIOS boot order was changed (to get into the BIOS, press
-
Knowledge Gained:
- The target PC uses target driver Intel182559 (but Auto works at least for 2013 versions).
- The target PC actually boots from a CD inserted into the machine. It has no other file system.
- You are able to burn a boot image to a USB drive (from
xpcexplr) and have the machine boot from this.- This did work for: Matlab 2013b, Matlab 2013a (tested just to see if another image would work)
- This did NOT work for: Matlab 2017b. Although not sure why, the PC tries to boot from the USB drive, but hangs there. I tried to set these settings in the BIOS, but the available settings had no effect.
¶ 2022-09-14
Alex and Stefano
Worked on:
LinMot Drivers, LinMot Talk and TWINCAT to enable Current mode on hip actuators
Changes Made:
-
Install LinMot Talk 5.0 (3.17 Build B20120710 Firmware version, from LinMot Talk V5S1 B20121010). We can try to update the firwmare of the LinMot Drivers, but today this is not needed.
-
Connect LinMot Talk with the Axis 3 Driver (RA) following this guide. We bought a UGREEN connector to do it.
-
In LinMot Talk, change
Parameters - Motion Control SW - Drive Configuration - X14 I/O Definitions - Diff Analog In -10..10V - Analog Input - Signal Type - Current(UPID 62B3h from0000hto0002h).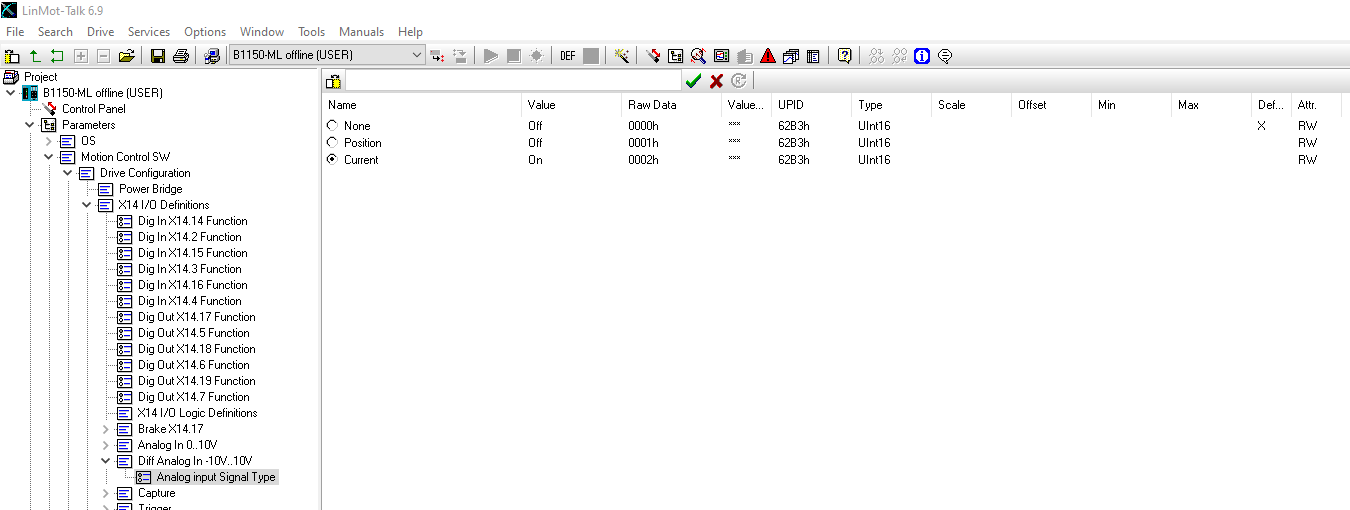
-
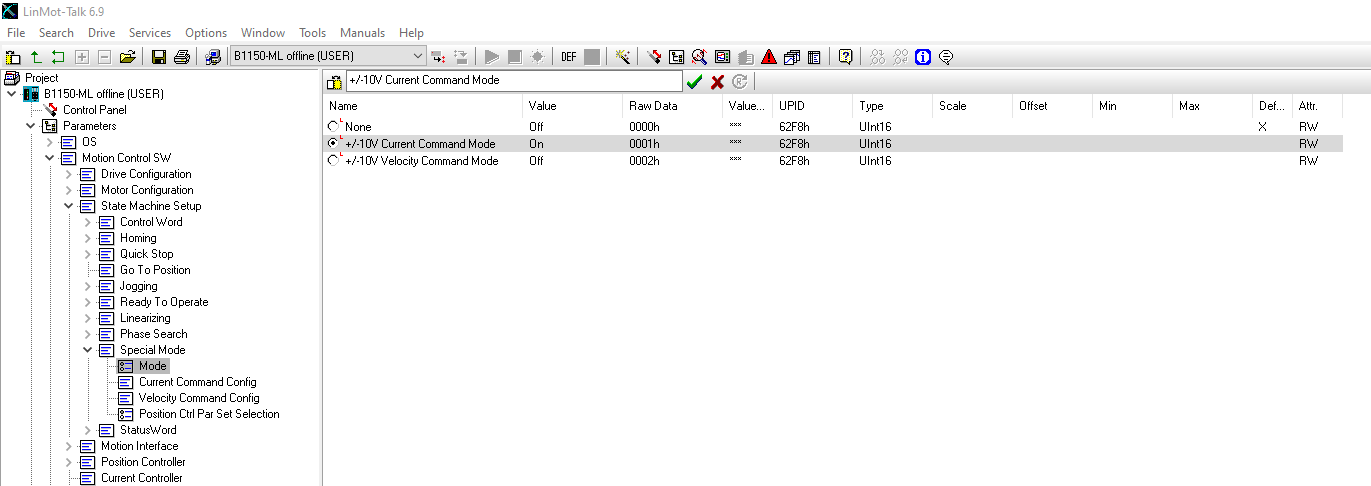
In LinMot Talk, change
Parameters - Motion Control SW - State Machine Setup - Special Mode - Mode - +/- 10V Current Command Mode(UPID 62F8h from0000hto0001h)
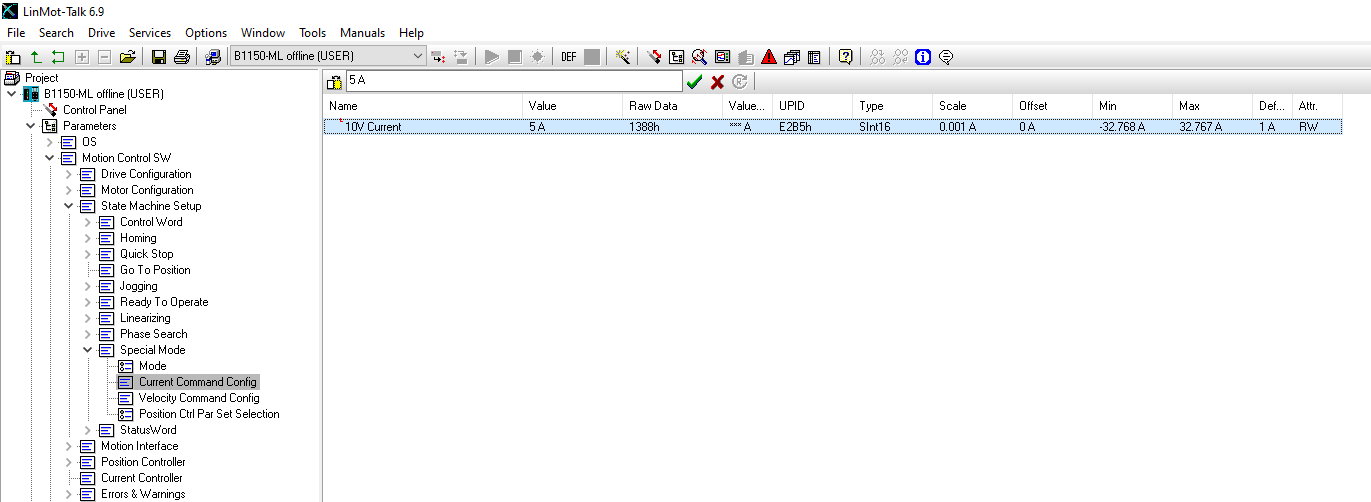
- In LinMot Talk, change
Parameters - Motion Control SW - State Machine Setup - Special Mode - Current Command Config - Value 5A(can be tuned according to motor specification) (UPID E2B5h from0000hto1388h)
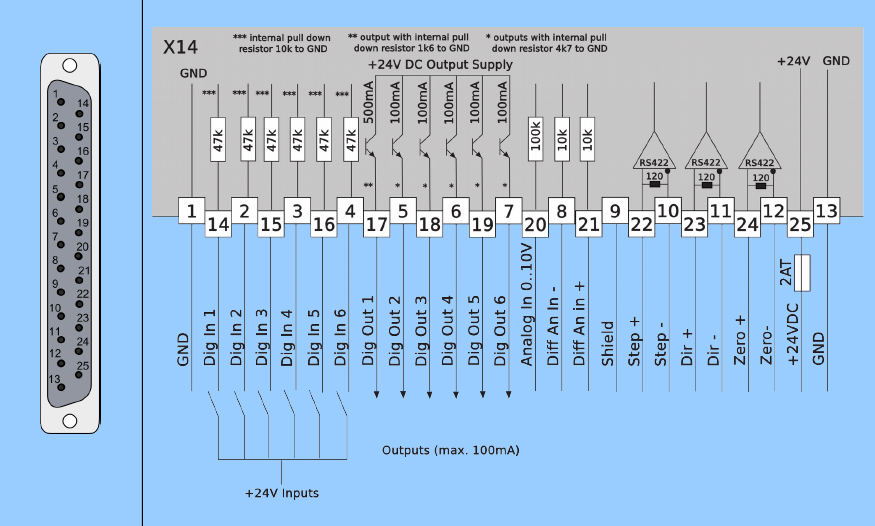
- On Driver B1150 (Axis 3), X14 Input Connector, Pins 8 and 21, inject Analog Voltage (tried with ± 5V).
-
In LinMot Talk, Control Panel, Override Homing Mode, then Override Special Mode. The LinMot is now current controlled.
-
In TWINCAT, send the ControlWord
2239(dec) to activateHoming Mode, then send the ControlWord1215(dec) to activate theSpecial Mode.
Knowledge Gained:
The B1150 can be current-controlled through the Special Mode.
-
Set the ControlWord through Ethercat to 1215 to enable Special Mode.
-
In Simulink, to date, trajectory following is done through the Motion Command Interface, which overrides the ControlWord. We can get rid of the Motion Command Interface and just use the ControlWord and an Analog Signal. Homing mode is still functional.
-
Alternatively, in LinMot Talk, additional features can be enabled to use the Analog mode without EtherCAT:
-
Parameters - Motion Control SW - Motion Interface - Run Mode Settings - Run Mode Selection (UPID 62A8h from
Motion Command InterfacetoAnalog).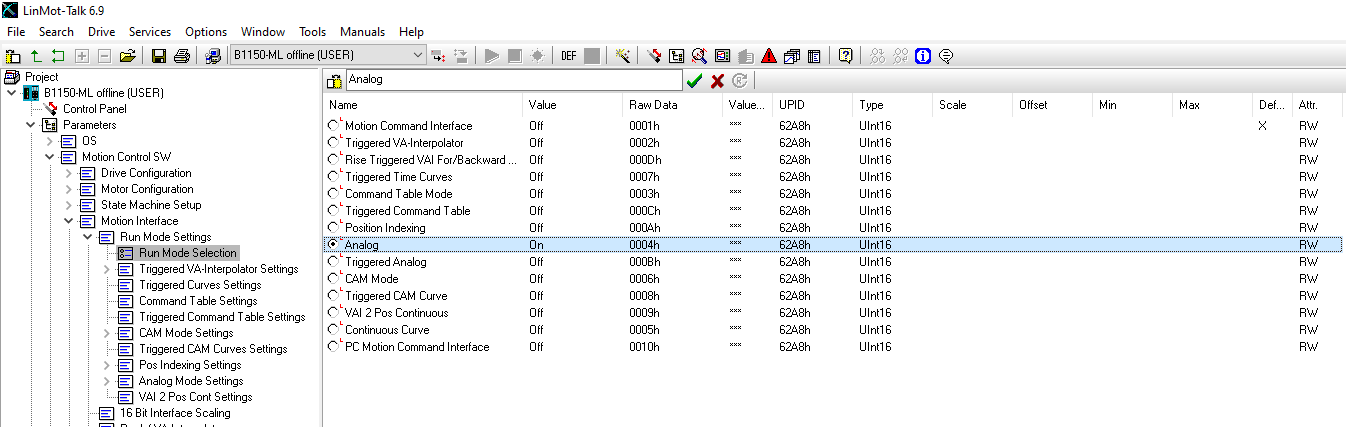
-
-
In LinMot Talk, to reproduce Encoder Signals on X13 Output Connector, change
Motion Control SW -> Motor Configuration -> Position Feedback -> Feedback on X13 -> Sensor Type -> Encoder Simulation(UPID6118hfrom 0000h to 0007)
TO-DO:
Change Configuration for Axis 4,5,6
Connect Humusoft board signals to the X14 Input Connectors
Test current-control with a simple Simulink Model, evaluate delays and latency.
¶ 2022-11-09
Stefano
Worked on:
- Transparent mode with Right Hip actuators: Axis 3 (Right Outer) and 5 (Right Inner)
Changes Made:
-
Connect Humusoft board signals to the X14 Input Connectors (with Maurits help).
-
Created a new Simulink model to control Hip actuators through the Humusoft analog signals.
-
Implemented soft-stop control, coupling control, and viscous compensation control.
-
Briefly tested, stiction and static friction is still noticeable.
Knowledge Gained:
Hip actuators can work in current control mode within Simulink. Transparency is fair and movement is quite smooth.
Control frequency is still very low
¶ 2022-11-16
Stefano
Worked on:
- Transparent mode with Hip and Knee actuators.
Changes Made:
-
The Hip actuators are now controlled in Special Mode, which permits to control the actuators in current/force control. The target current is set to the driver through the Humusoft board.
-
The Knee actuators are controlled in current control through the Humusoft board.
-
Hip - the following controllers have been implemented:
- Friction compensation: viscous friction compensation, need for a static friction compensation.
- Soft-stop: virtual stiffness/damping are implemented at the boundaries of the range of motion: a repulsive spring is placed at 5 degrees from the hard end-stop.
- Coupling: to make the leg move in the sagittal plane, a coupling assistance is added. The inner and outer actuators are coupled by a 5 degrees angle. The coupling is implemented with virtual stiffness/damping model.
-
Knees - the following controllers have been implemented:
- Zero-torque control: the torque feedback from the loadcell is used to reject friction at the knees. Note: left knee loadcell signal is very noisy. Ordered a new LEMO connector for that.
- Friction compensation: viscous friction compensation, need for a static friction compensation. Note: left knee has higher friction, to be investigated.
Knowledge Gained:
The Lokomat legs can be controlled in transparent mode.
Left leg (hip and knee) exhibits higher friction than right leg. To be investigated.
Control frequency is still very low. Due to this, the knees sometimes exhibit unstable behavior when close to the end-stop. Need for proper gains tuning.
¶ 2023-07
¶ 2023-07
Stefano and Thomas
Worked on:
- Replaced old LinMot Drivers (BM8050+B1150) with new C1250 Drivers.
- Increased control frequency to 1kHz for the new simulink model for haptic display.
- Tried to update MATLAB to R2017b with no success.
Changes Made:
- Removed the B1150 drivers and the BM8050 gateway and replaced them with 4x C1250.
- Configured the C1250 drivers with LinMot-Talk 6.11 Build 20221104.
- Configured the ENI files using EtherCAT Configurator for the demo simulink software. See here for general information or here for specific guidance on the Lokomat setup.
Knowledge Gained:
MATLAB R2013b only works with EtherCAT Configurator
MATLAB R2017b only works with TwinCAT
The Lokomat can now be controlled at 1kHz. The knee drives behavior has improved, showing good rendering capability.
The Lokomat demo runs at 500 Hz.
The Maxon drivers 24V is not connected to the Lokomat Emergency Stop. Should be fixed asap.
¶ 2023-08
Stefano and Alex
Worked on:
- UDP connection: Unity <-> Simulink (for both LokoFree and LokoBasis).
- Connected LokoFree to LokoBasis using UDP communication (similar to the Unity/Host-PC connection blocks, just with different IPs to send/receive).
Changes Made:
-
Added extra NIC, because couldnt do host-target communication and UDP communication using the same NIC.
-
The new NIC is used for EtherCAT communication, as it is not compatible for UDP (I8254x), which frees up the older one for UDP. (To see what PCI port has what, type
getxpcpci('all'))- EtherCAT - Bus:
1, Slot:11- Intel I8254x - Host-Target communication - Bus:
1, Slot:8- Intel I82559 - UDP Communication - Bus:
1, Slot:9- Intel I82559
- EtherCAT - Bus:
-
Made a new Simulink model called
Treadmill_UDP.slx, which is the exact same but also includes some UDP blocks.
Knowledge Gained:
Real-Time UDP only works on I8255x cards.
On LokoFree, you can’t run Host-Target communication at the same time as UDP on a single NIC. However, on LokoBasis you can (for whatever reason).
UDP communication runs at 1kHz on LokoFree (uses
Real-Time UDP blocks). LokoBasis uses other xPC UDP blocks, which run over the same cables as the host-target connection.
We ran into an issue where the LMIF Error on the LokoBasis suddenly turned to
3--> MeaningWatchdog timer error(communication between motor driver and treadmill computer was dropping), which made the treadmill brake act very strange turning on/off. To fix this we changed 4 things, and we’re not (yet) sure what was the actual fix: 1. Different network switch, 2. Changed ports from25000to25005, 3. We lowered the send rate of the UDP connection from LokoFree to LokoBasis to100Hz, 4. Reduced the amount of displays etc. We think it is most likely fixed by 3, the lowering of the send rate.
¶ 2023-08-25
Stefano and Thomas
Worked on:
- Emergency Stop did not kill the Maxon Drivers power supply.
Changes Made:
- Cable management and rewiring of power supply emergency stop
Emergency Stop now kills LinMot Drivers and Maxon Drivers power supply.
¶ 2023-09-01
Stefano and Alex vdB
Worked on:
- Saving data w/ File Scope
- Checking rotation of pelvis module for FK
- Kalman filter
Changes made:
- The Kalman filter is temporarily disabled as the rotation output is completely off. Needs further debugging.
- We added a LPF to the Camera sensors and fix the bug. Now when camera_status == 0, the output is the previous valid data and not a random configuration.
Knowledge gained:
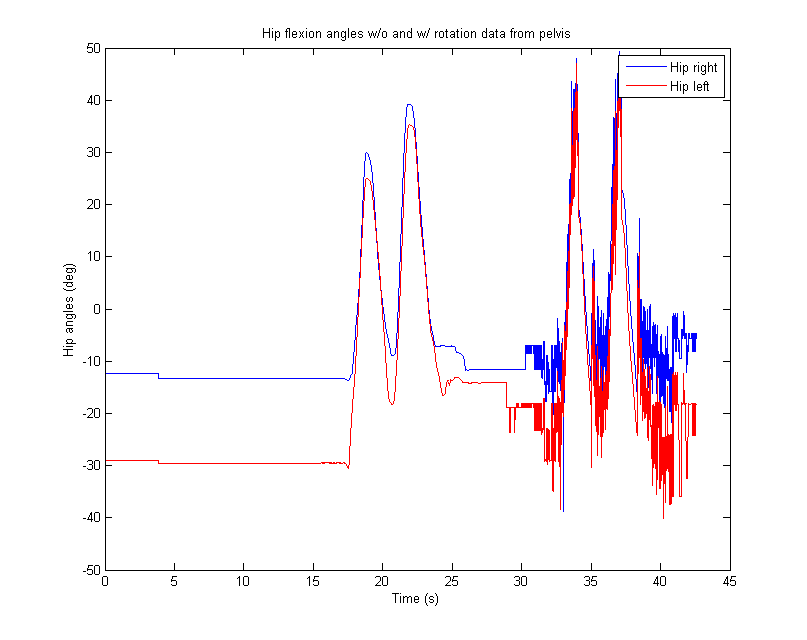
Pelvis rotation angles are very noisy. We decided to not use them in the computation of the forward kinematics (hip angles)
¶ 2025
¶ 2025-04-28
AvdB:
-
The potentiometer (attached on top of the linmots) cabling broke and was repaired due to just using the robot. One of the Linmot cables got stuck on the tiny pot-meter cables, and broke it off. Not too much of an issue, but something to be aware of.
-
A lot of work has been done in the past weeks to improve the tranparency. This is retuning of the friction compensation, improving the gravity compensation a lot, and making sure the kinematics work correcly, including the pelvis plate position.
-
Part of this was taking out potential causes for crashes in the FK/IK code blocks. Hopefully all of these have been taken out now, but if you get random unexplained crashes in the future (the whole xPC screen freezes up and the PC is not pingable etc), there is likely a inf or division by 0 or something in the code somewhere. --> Note: this is still not using the kalman filter, but just the camera, without the IMU at the moment. Not sure why, but I don’t really have time to look into it better.
-
The software crashed (probably a division by 0), which resulted in the BWS motor running into the hard stop. This slightly dislodged the coupler, which made it run into the brace holding the BWS motor. This prevented the motor from turning. To fix this. Take the holding pin out of the coupler (on the side of the motor), push the coupler outwards as far as it will go (this will create ~0.5mm of space between the coupler and the motor brace), and then reinsert the holding pin as tightly as it will go. In the long term, this should be fixed by creating a little more space there.